Rotor de Antena - Parte 2
 Escrito por
Lucas Teske
Escrito por
Lucas Teske
em
Continuando o projeto do tracker, consegui alguns progressos significativos. Assim como o Demilson (PY2UEP) tinha cortado os motores originais, fiz o mesmo. O motor do azimute estava bem enferrujado e acabei estragando uma de suas bobinas (queria reaproveitar o fio), mas no fim o eixo saiu.
Após o eixo removido, quebrei o imã com um martelo até que não sobrasse mais pedaços de imã no eixo, desta maneira restando apenas o suporte sextavado de onde era preso o imã.


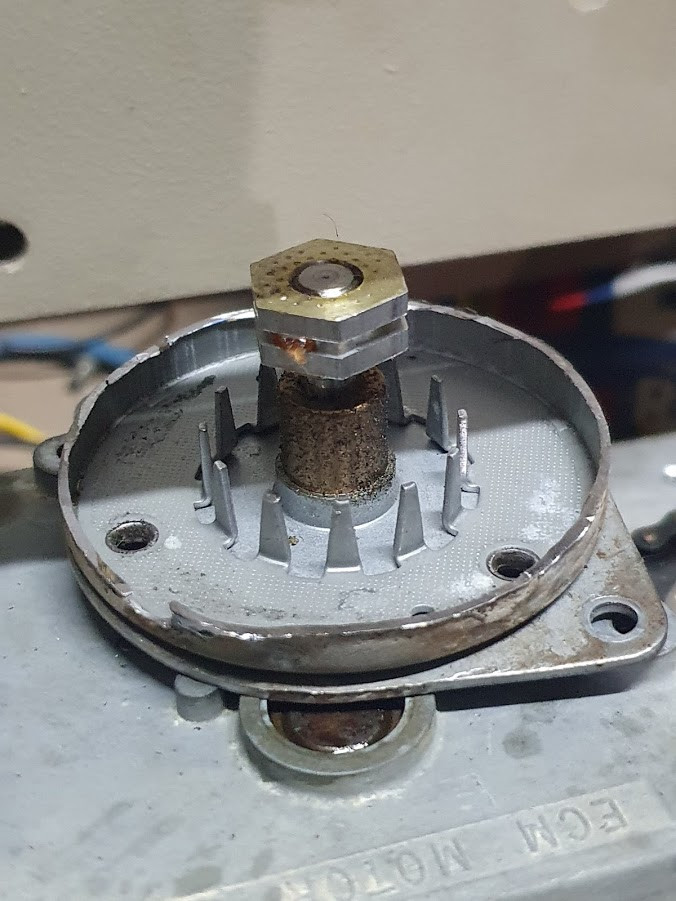 Eixo do motor do azimute mostrando o suporte sextavado do imã
Eixo do motor do azimute mostrando o suporte sextavado do imã
Já para o motor da elevação, fiz um corte lateral no motor bem em uma marca circular que tem próximo a saída do motor. Desse jeito poderia usar o mesmo suporte e eixos do motor original para melhor acoplamento com o redutor.
 “tampa” do motor de elevação cortado
“tampa” do motor de elevação cortado
 Tampa + Redutor
Tampa + Redutor
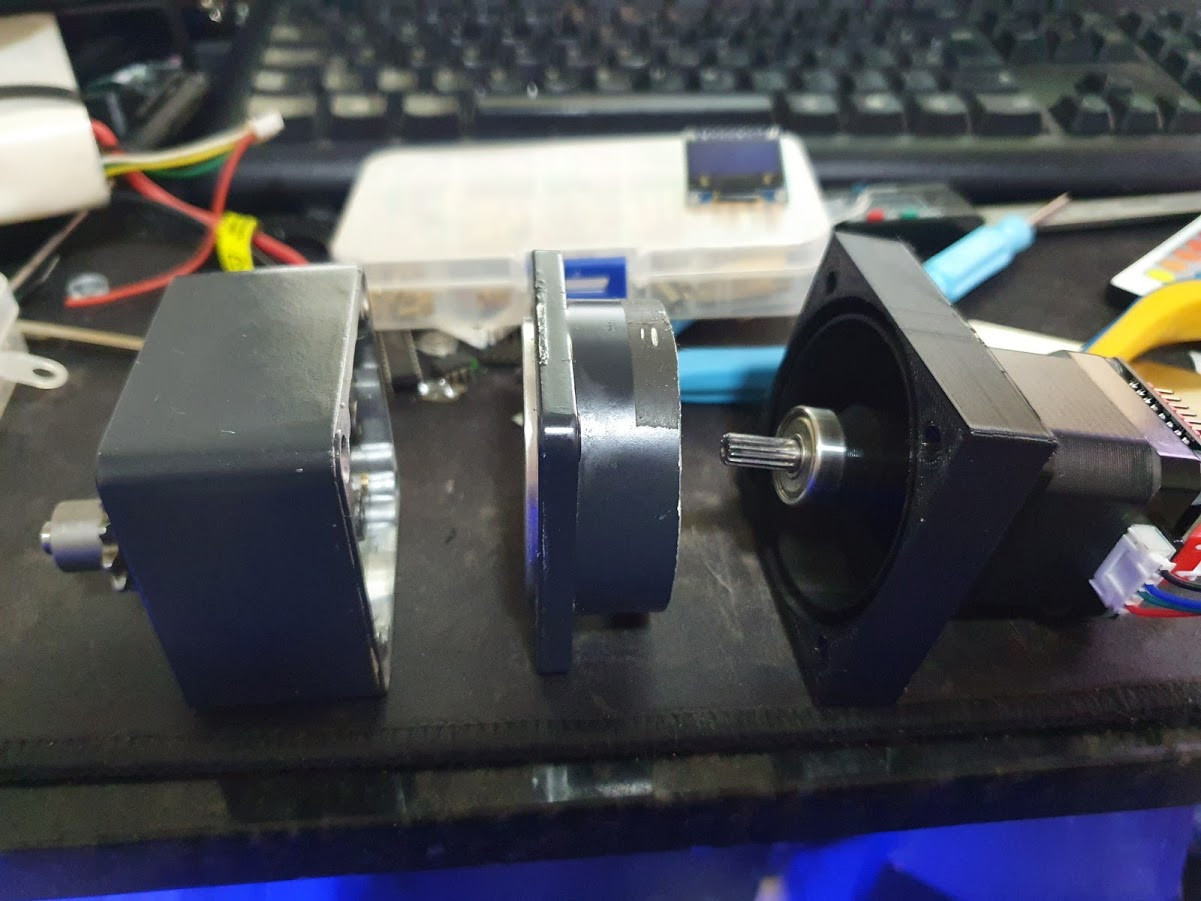
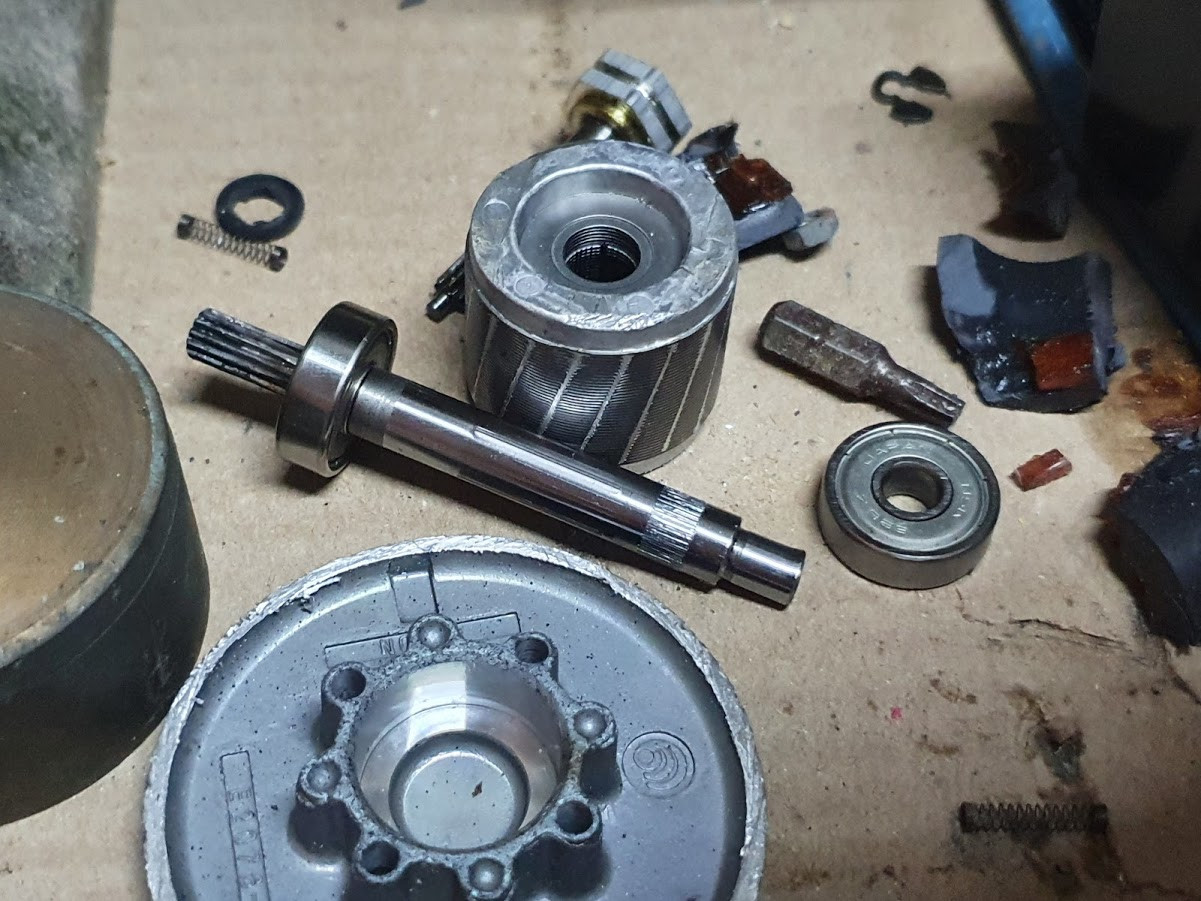 Peças do Motor
Peças do Motor
Para a elevação, foi necessário cortar o do motor original e fazer um “vinco” na lateral dele para encaixar melhor na peça que seria impressa em 3D. Para fazer isso, coloquei o eixo original entre duas madeiras (por sugestão do meu pai) e efetuamos o corte do eixo. Para os vincos, usamos a esmerilhadeira.
 Eixo cortado no meio de duas madeiras
Eixo cortado no meio de duas madeiras
 Eixo cortado na tampa do motor
Eixo cortado na tampa do motor
Com isso eu poderia, então, começar os desenhos em 3D para as adaptações.
Impressões 3D
Depois de muita tentativa e erro, consegui acertar os encaixes entre os eixos. Porém percebi um problema: O espaço para o motor do azimute estava extremamente limitado, a ponto de meus motores NEMA 17 de 40mm serem grandes demais para o espaço.

 Adaptação para Azimute
Adaptação para Azimute
Para isso tive que comprar motores “slim” para o local. Fiquei um pouco preocupado com torque, mas minhas tentativas de fazer com engrenagens e tudo mais foram por água abaixo. Os motores em questão foram comprados a Aliexpress (confira no fim do post pelos links)
Enquanto o motor não chegava, fiquei otimizando os adaptadores para serem os mais curtos possíveis, economizando todo espaço possível. Eu uso o FreeCAD por ser gratuito e também onde eu sei mexer melhor. Porém não assuma que eu realmente sou um designer 3D, pois eu não sou. As peças são apenas “funcionais”.
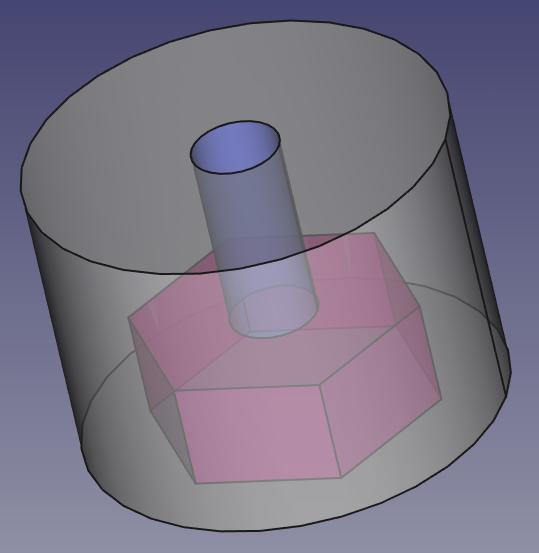 Adaptador de eixo do azimute
Adaptador de eixo do azimute
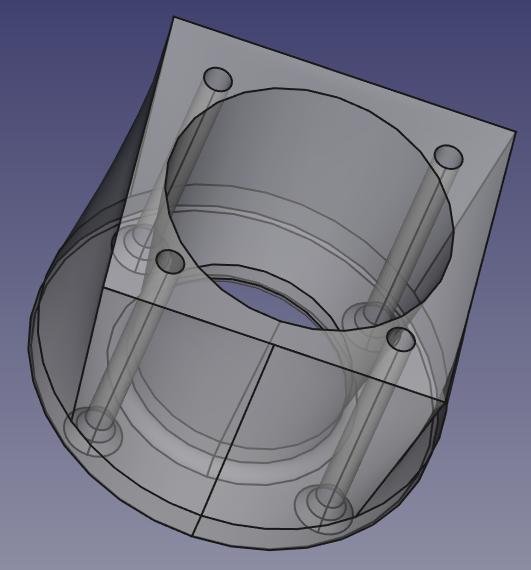 Suporte do azimute
Suporte do azimute
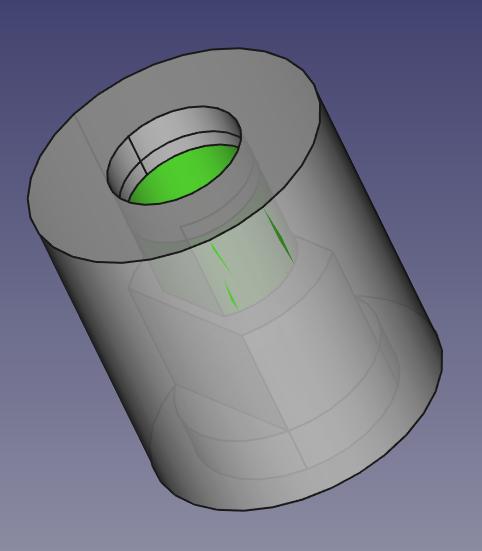 Adaptador de eixo da elevação
Adaptador de eixo da elevação
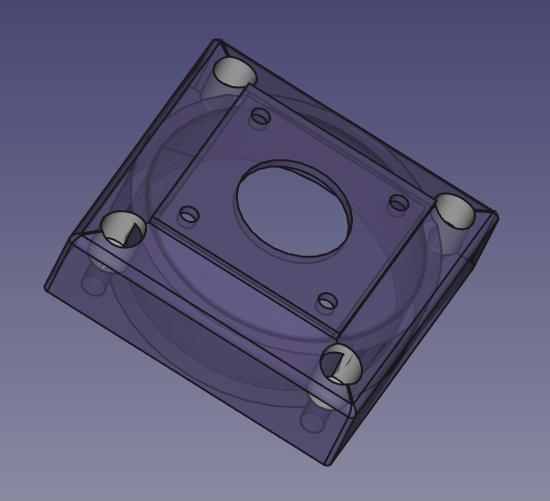 Suporte da elevação
Suporte da elevação
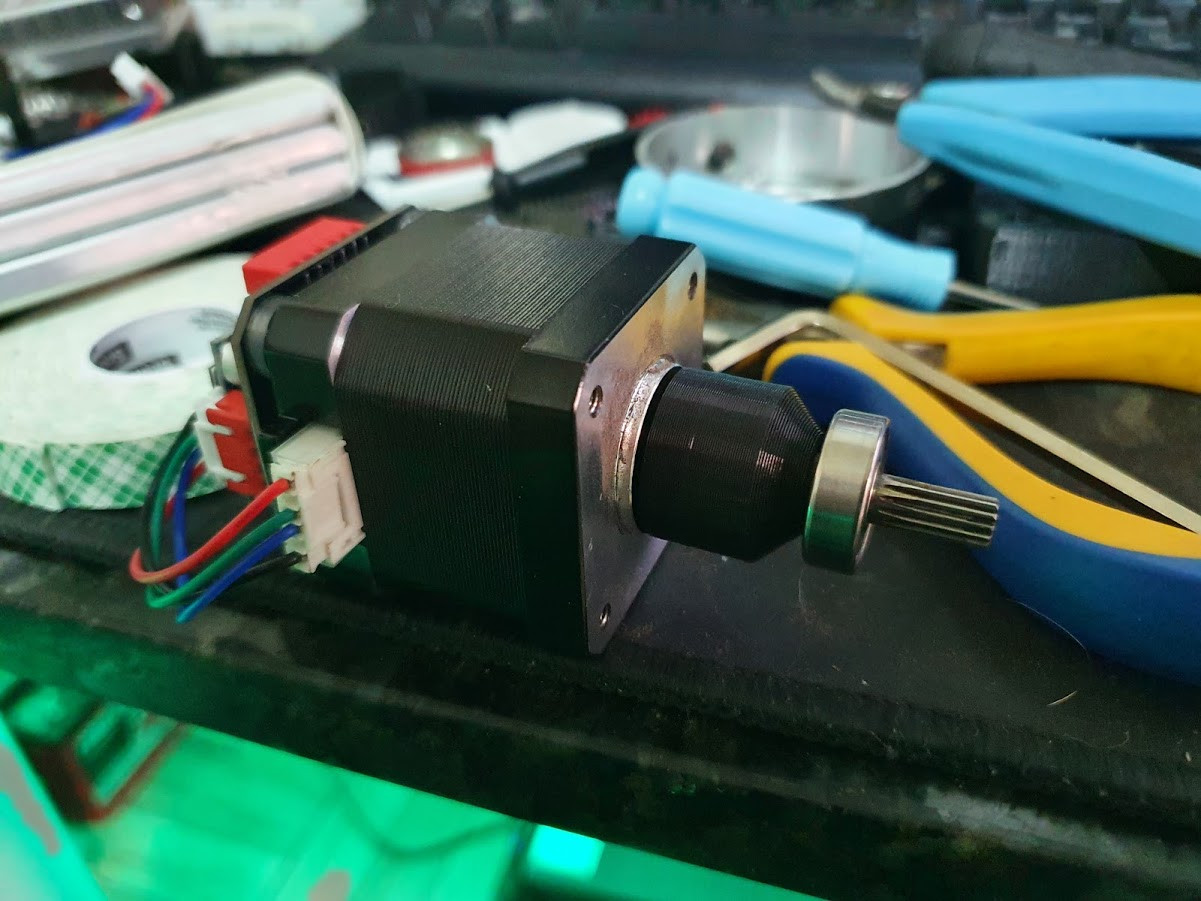
E o primeiro eixo a funcionar foi o da elevação. Para isso usei motores de 40 mm NEMA17 (link no fim do post), que de fabrica eram closed-loop (com encoder magnético) porém acabei usando drivers TMC2209 por serem mais práticos e silenciosos.
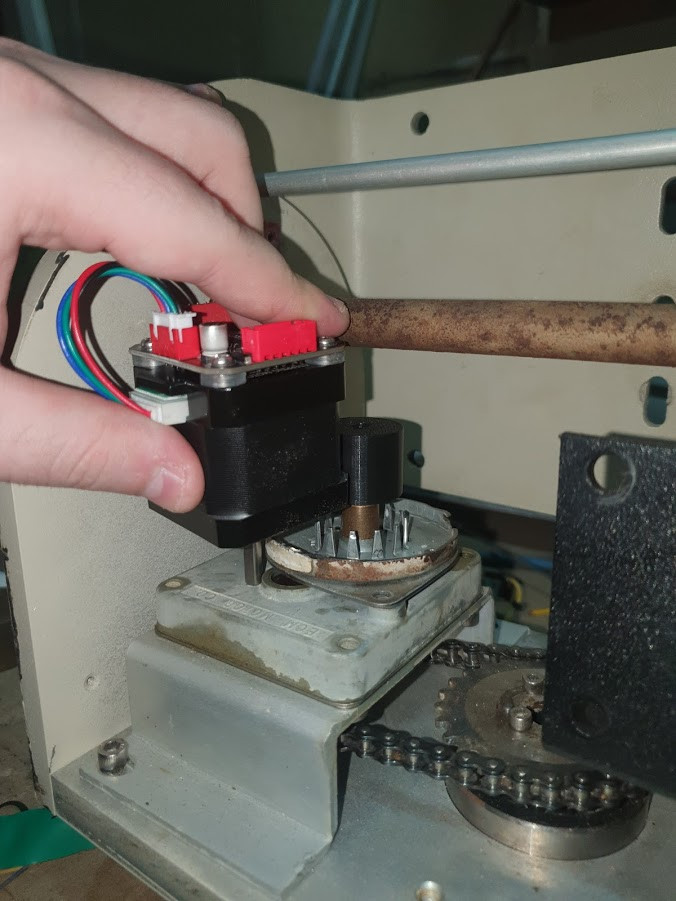
Após a chegada dos novos motores para o azimute, tratei de logo montar tudo e ver se ia caber. E coube!


E também funcionando!
Após tudo funcionando, fiz os testes para saber a resolução final e redução de ambos eixos. Para isso usei este código para o ESP32 controlar o TMC2209 e o meu celular preso ao eixo da elevação para medições de ângulo.
#include <TMCStepper.h>
#define STEP_PIN 12 // Step
#define EN_PIN 23 // Enable
#define SERIAL_PORT Serial2 // TMC2208/TMC2224 HardwareSerial port
#define DRIVER_ADDRESS 0b00 // TMC2209 Driver address according to MS1 and MS2
#define R_SENSE 0.11f
TMC2209Stepper driver(&SERIAL_PORT, R_SENSE, DRIVER_ADDRESS);
void setup() {
pinMode(STEP_PIN, OUTPUT);
pinMode(EN_PIN, OUTPUT);
digitalWrite(EN_PIN, LOW);
SERIAL_PORT.begin(115200); // HW UART drivers
Serial.begin(115200);
driver.begin(); // UART: Init SW UART (if selected) with default 115200 baudrate
driver.toff(10); // Enables driver in software
driver.rms_current(1000); // Set motor RMS current
driver.microsteps(2); // Set microsteps to 1/16th
driver.en_spreadCycle(false); // Toggle spreadCycle on TMC2208/2209/2224
driver.pwm_autoscale(true); // Needed for stealthChop
Serial.println("OK");
digitalWrite(EN_PIN, HIGH);
}
bool shaft = false;
void loop() {
// Serial.println("TURN");
if (Serial.available() > 0) {
int z = Serial.read();
if (z == 'a') {
Serial.println("Stepping 10000");
digitalWrite(EN_PIN, LOW);
for (uint32_t i = 10000; i>0; i--) {
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(350);
digitalWrite(STEP_PIN, LOW);
delayMicroseconds(350);
}
digitalWrite(EN_PIN, HIGH);
} else if (z == 'b') {
shaft = !shaft;
Serial.print("Shaft direction: ");
Serial.println(shaft);
driver.shaft(shaft);
}
}
}
Os resultados foram:
- Eixo Elevação
- Redução aproximada: 1:3500
- Resolução Angular: 0,000117 graus / passo
- Velocidade Máxima: 0,62 graus / segundo
- Eixo Azimute
- Redução aproximada: 1:392
- Resolução Angular: 0,0046 graus / passo
- Velocidade Máxima: 6,3 graus / segundo
Os resultados parecem bem promissores, e caso tudo dê certo, será suficiente para rastreamento de satélites!
O próximo passo será montar o software e o hardware para controlar via rede!
Os modelos 3D (tanto Freecad quanto STL) estão disponíveis no Thingverse (ver seção de links)
Links
- Motor para Azimute
- Motor para Elevação (Closed-Loop)
- Motor para Elevação (Normal)
- Drivers TMC2209
- Arquivos STL / Freecad
Cite este artigo Plain text · BibTeX
Citação sugerida
Lucas Teske. “Rotor de Antena - Parte 2.” Lets Hack It, 2021. https://lucasteske.dev/pt/2021/04/rotor-antenna-parte-2.
BibTeX
@misc{teske2021rotorantennaparte2,
author = {Lucas Teske},
title = {Rotor de Antena - Parte 2},
year = {2021},
publisher = {Lets Hack It},
url = {https://lucasteske.dev/pt/2021/04/rotor-antenna-parte-2}
}