STM32F0x Protected Firmware Dumper
 Escrito por
Lucas Teske
Escrito por
Lucas Teske
em
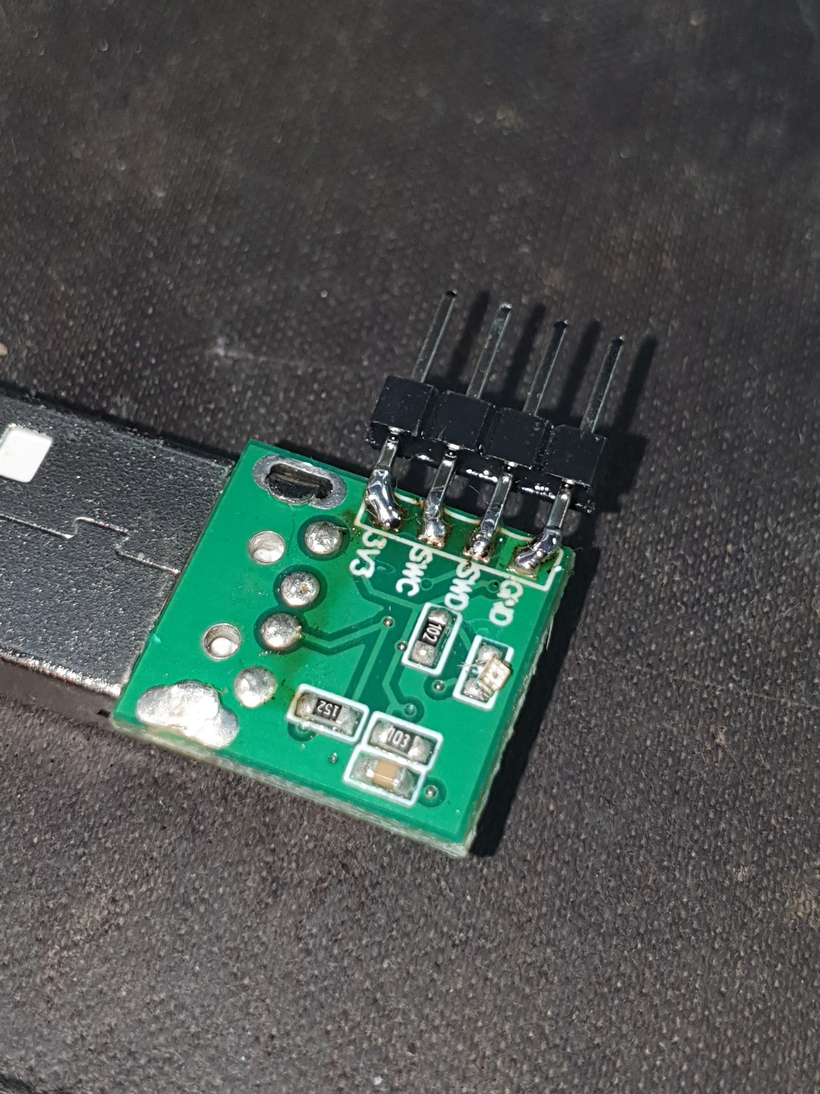
No processo do meu hobby de hackear hardware, encontrei um clone chinês de um dongle HASP HL equipado com um processador STM32F042G6U6. Minha intenção era cloná-lo, e durante minha exploração, descobri quatro pinos da interface de depuração SWD localizados na parte inferior da PCB. Soldei um conector de 4 pinos nesses pinos para facilitar o acesso.
Utilizando meu Segger J-Link como uma sonda de depuração, embora qualquer adaptador JTAG deva ser suficiente, eu o combinei com o OpenOCD. Dado que o chipset é reconhecido pelo OpenOCD, eu criei um script para extrair todos os dados possíveis, condicionados à habilitação.
adapter driver jlink
transport select swd
adapter_khz 4000
source [find target/stm32f0x.cfg]
init
dap info
reset halt
flash read_bank 0 firmwareF1.bin 0 0x8000
reset
shutdown
Mas, encontrei um obstáculo - a proteção RDP (Read-Out Protection) do dispositivo estava ativada, mesmo com o SWD ativo. Sem problemas, pensei, e tentei contornar isso com injeção de falha de tensão. No entanto, o gerador de clock interno no dispositivo tornou a interferência no clock inviável. Após algumas horas sem progresso, ficou claro que eu precisava de um novo plano.
Minha busca por alternativas me levou a um artigo abrangente detalhando três metodologias para extrair memória protegida:
https://www.aisec.fraunhofer.de/en/FirmwareProtection.html
Tentei o Método de Boot a Frio, mas sem sucesso - provavelmente porque eu não conseguia mexer no relógio do dispositivo, e isso é praticamente um ponto crucial para que funcionasse. O método UVC? Muito arriscado, e eu não estava disposto a arruinar o dongle. Então, restou a interferência no Porta de Depuração SWD.
Havia uma Prova de Conceito (PoC) para esta falha, e ela tinha algumas informações boas, mas era tudo sobre código STM32 com um monte de coisas específicas do dispositivo. Eu precisava de algo mais universal. Depois de analisar a PoC e o artigo, misturei um pouco do meu próprio conhecimento e criei um novo código.
Para o campo de testes, conectei um Raspberry Pi Pico com platform.io. Tive que ir direto com o protocolo SWD, pois sondas de depuração padrão como meu J-Link eram muito invasivas na inicialização do dispositivo. Essa falha precisava de uma ação rápida na leitura da memória flash, e cada milissegundo contava.
Aqui está o ponto crucial - a proteção do código só entra em ação quando você tenta tocar na memória flash com o modo de depuração ativado. Mas se você for rápido, pode capturar um DWORD da flash antes que as portas se fechem.
Para extrair o firmware inteiro, é uma dança com o pino de reset e a fonte de energia do dispositivo. Você tem que ciclar a energia para resetar a bandeira do modo de depuração. Aqui está o passo a passo:
- Acione o pino de reset
- Ligue o dispositivo
- Solte o pino de reset
- Faça a leitura
- Corte a energia
- Repita o processo
O Raspberry Pi Pico foi tudo o que eu precisei para alimentar o dispositivo, já que o STM32 não consome muita energia. Se você estiver lidando com algo que exija mais energia, um transistor ou relé para alternar a energia pode ser a solução. Você pode conferir toda a operação e o código em https://github.com/racerxdl/stm32f0-pico-dump ou disponível abaixo.
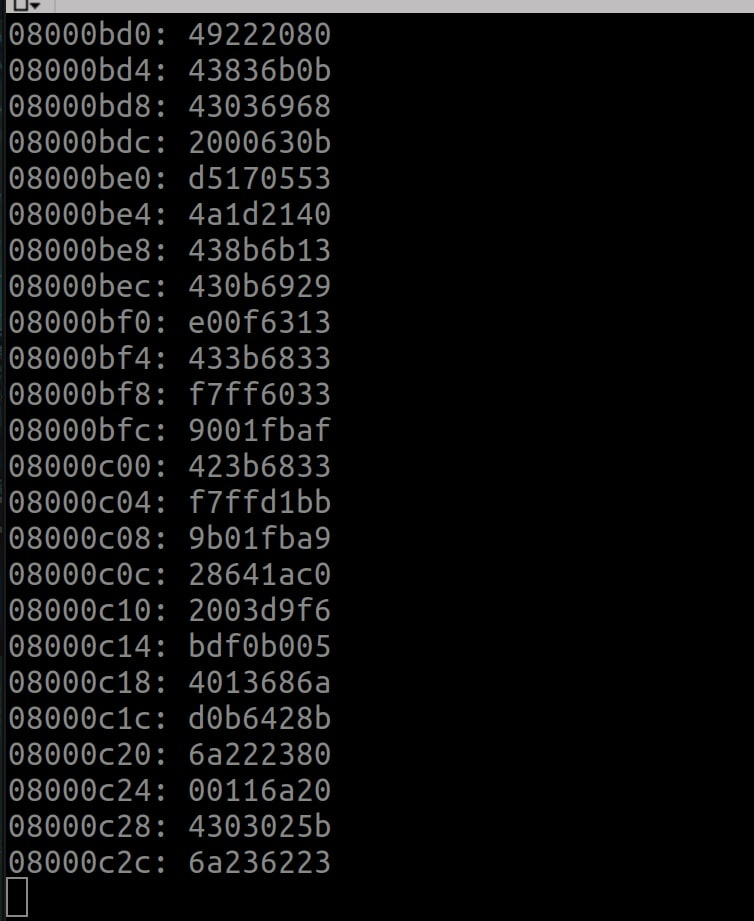 Uma imagem mostrando fluxos de dados DWORD do firmware STM32F0 sendo transmitidos em tempo real via porta serial do Raspberry Pi Pico, iluminando o terminal com linhas de código extraído.
Uma imagem mostrando fluxos de dados DWORD do firmware STM32F0 sendo transmitidos em tempo real via porta serial do Raspberry Pi Pico, iluminando o terminal com linhas de código extraído.
Code
hal.c
/*
* Copyright (C) 2017 Obermaier Johannes
* Copyright (C) 2022 Lucas Teske
*
* This Source Code Form is subject to the terms of the MIT License.
* If a copy of the MIT License was not distributed with this file,
* you can obtain one at https://opensource.org/licenses/MIT
*/
#include "main.h"
void targetInit(void) {
targetPowerOff();
targetReset();
}
void targetReset(void) {
digitalWrite(TARGET_RESET_Pin, LOW);
}
void targetRestore(void) {
digitalWrite(TARGET_RESET_Pin, HIGH);
}
void targetPowerOff(void) {
digitalWrite(TARGET_PWR_Pin, LOW);
}
void targetPowerOn(void) {
digitalWrite(TARGET_PWR_Pin, HIGH);
}
reader.c
/*
* Copyright (C) 2017 Obermaier Johannes
* Copyright (C) 2022 Lucas Teske
*
* This Source Code Form is subject to the terms of the MIT License.
* If a copy of the MIT License was not distributed with this file,
* you can obtain one at https://opensource.org/licenses/MIT
*/
#include "main.h"
#include "swd.h"
/* Reads one 32-bit word from read-protection Flash memory. Address must be 32-bit aligned */
swdStatus_t extractFlashData(uint32_t const address, uint32_t* const data) {
swdStatus_t dbgStatus;
/* Add some jitter on the moment of attack (may increase attack effectiveness) */
static uint16_t delayJitter = DELAY_JITTER_MS_MIN;
uint32_t extractedData = 0u;
uint32_t idCode = 0u;
/* Limit the maximum number of attempts PER WORD */
uint32_t numReadAttempts = 0u;
/* try up to MAX_READ_TRIES times until we have the data */
do {
digitalWrite(LED1_Pin, LOW);
targetPowerOn();
delay(5);
dbgStatus = swdInit(&idCode);
if (dbgStatus == swdStatusOk) {
dbgStatus = swdEnableDebugIF();
}
if (dbgStatus == swdStatusOk) {
dbgStatus = swdSetAP32BitMode(NULL);
}
if (dbgStatus == swdStatusOk) {
dbgStatus = swdSelectAHBAP();
}
if (dbgStatus == swdStatusOk) {
targetRestore();
delay(delayJitter);
/* The magic happens here! */
dbgStatus = swdReadAHBAddr((address & 0xFFFFFFFCu), &extractedData);
}
targetReset();
/* Check whether readout was successful. Only if swdStatusOK is returned, extractedData is valid */
if (dbgStatus == swdStatusOk) {
*data = extractedData;
digitalWrite(LED1_Pin, HIGH);
} else {
++numReadAttempts;
delayJitter += DELAY_JITTER_MS_INCREMENT;
if (delayJitter >= DELAY_JITTER_MS_MAX) {
delayJitter = DELAY_JITTER_MS_MIN;
}
}
targetPowerOff();
delay(1);
targetRestore();
delay(2);
targetReset();
delay(1);
} while ((dbgStatus != swdStatusOk) && (numReadAttempts < (MAX_READ_ATTEMPTS)));
return dbgStatus;
}
swd.c
/*
* Copyright (C) 2017 Obermaier Johannes
* Copyright (C) 2022 Lucas Teske
*
* This Source Code Form is subject to the terms of the MIT License.
* If a copy of the MIT License was not distributed with this file,
* you can obtain one at https://opensource.org/licenses/MIT
*/
#include "swd.h"
#include "main.h"
#define MWAIT __asm__ __volatile__( \
".syntax unified \n" \
" movs r0, #0x20 \n" \
"1: subs r0, #1 \n" \
" bne 1b \n" \
".syntax divided" \
: \
: \
: "cc", "r0")
#define N_READ_TURN (3u)
static uint8_t swdParity(uint8_t const* data, uint8_t const len);
static void swdDatasend(uint8_t const* data, uint8_t const len);
static void swdDataIdle(void);
static void swdDataPP(void);
static void swdTurnaround(void);
static void swdReset(void);
static void swdDataRead(uint8_t* const data, uint8_t const len);
static void swdBuildHeader(swdAccessDirection_t const adir, swdPortSelect_t const portSel, uint8_t const A32, uint8_t* const header);
static swdStatus_t swdReadPacket(swdPortSelect_t const portSel, uint8_t const A32, uint32_t* const data);
static swdStatus_t swdWritePacket(swdPortSelect_t const portSel, uint8_t const A32, uint32_t const data);
static swdStatus_t swdReadAP0(uint32_t* const data);
static uint8_t swdParity(uint8_t const* data, uint8_t const len) {
uint8_t par = 0u;
uint8_t cdata = 0u;
uint8_t i;
for (i = 0u; i < len; ++i) {
if ((i & 0x07u) == 0u) {
cdata = *data;
++data;
}
par ^= (cdata & 0x01u);
cdata >>= 1u;
}
return par;
}
static void swdDatasend(uint8_t const* data, uint8_t const len) {
uint8_t cdata = 0u;
uint8_t i;
for (i = 0u; i < len; ++i) {
if ((i & 0x07u) == 0x00u) {
cdata = *data;
++data;
}
if ((cdata & 0x01u) == 0x01u) {
digitalWrite(SWDIO_Pin, HIGH);
} else {
digitalWrite(SWDIO_Pin, LOW);
}
MWAIT;
digitalWrite(SWCLK_Pin, HIGH);
MWAIT;
digitalWrite(SWCLK_Pin, LOW);
cdata >>= 1u;
MWAIT;
}
}
static void swdDataIdle(void) {
digitalWrite(SWDIO_Pin, HIGH);
MWAIT;
pinMode(SWDIO_Pin, INPUT);
MWAIT;
}
static void swdDataPP(void) {
MWAIT;
digitalWrite(SWDIO_Pin, LOW);
pinMode(SWDIO_Pin, OUTPUT);
MWAIT;
}
static void swdTurnaround(void) {
digitalWrite(SWCLK_Pin, HIGH);
MWAIT;
digitalWrite(SWCLK_Pin, LOW);
MWAIT;
}
static void swdDataRead(uint8_t* const data, uint8_t const len) {
uint8_t i;
uint8_t cdata = 0u;
MWAIT;
swdDataIdle();
MWAIT;
for (i = 0u; i < len; ++i) {
cdata >>= 1u;
cdata |= digitalRead(SWDIO_Pin) ? 0x80u : 0x00u;
data[(((len + 7u) >> 3u) - (i >> 3u)) - 1u] = cdata;
digitalWrite(SWCLK_Pin, HIGH);
MWAIT;
digitalWrite(SWCLK_Pin, LOW);
MWAIT;
/* clear buffer after reading 8 bytes */
if ((i & 0x07u) == 0x07u) {
cdata = 0u;
}
}
}
static void swdReset(void) {
uint8_t i;
MWAIT;
digitalWrite(SWCLK_Pin, HIGH);
digitalWrite(SWDIO_Pin, HIGH);
MWAIT;
/* 50 clk+x */
for (i = 0u; i < (50u + 10u); ++i) {
digitalWrite(SWCLK_Pin, HIGH);
MWAIT;
digitalWrite(SWCLK_Pin, LOW);
MWAIT;
}
digitalWrite(SWDIO_Pin, LOW);
for (i = 0u; i < 3u; ++i) {
digitalWrite(SWCLK_Pin, HIGH);
MWAIT;
digitalWrite(SWCLK_Pin, LOW);
MWAIT;
}
}
static void swdBuildHeader(swdAccessDirection_t const adir, swdPortSelect_t const portSel, uint8_t const A32, uint8_t* const header) {
if (portSel == swdPortSelectAP) {
*header |= 0x02u; /* Access AP */
}
if (adir == swdAccessDirectionRead) {
*header |= 0x04u; /* read access */
}
switch (A32) {
case 0x01u:
*header |= 0x08u;
break;
case 0x02u:
*header |= 0x10u;
break;
case 0x03u:
*header |= 0x18u;
break;
default:
case 0x00u:
break;
}
*header |= swdParity(header, 7u) << 5u;
*header |= 0x01u; /* startbit */
*header |= 0x80u;
}
static swdStatus_t swdReadPacket(swdPortSelect_t const portSel, uint8_t const A32, uint32_t* const data) {
swdStatus_t ret;
uint8_t header = 0x00u;
uint8_t rp[1] = {0x00u};
uint8_t resp[5] = {0u};
uint8_t i;
swdBuildHeader(swdAccessDirectionRead, portSel, A32, &header);
swdDatasend(&header, 8u);
swdDataIdle();
swdTurnaround();
swdDataRead(rp, 3u);
swdDataRead(resp, 33u);
swdDataPP();
for (i = 0u; i < N_READ_TURN; ++i) {
swdTurnaround();
}
*data = resp[4] | (resp[3] << 8u) | (resp[2] << 16u) | (resp[1] << 24u);
ret = rp[0];
return ret;
}
static swdStatus_t swdWritePacket(swdPortSelect_t const portSel, uint8_t const A32, uint32_t const data) {
swdStatus_t ret;
uint8_t header = 0x00u;
uint8_t rp[1] = {0x00u};
uint8_t data1[5] = {0u};
uint8_t i;
swdBuildHeader(swdAccessDirectionWrite, portSel, A32, &header);
swdDatasend(&header, 8u);
MWAIT;
swdDataIdle();
MWAIT;
swdTurnaround();
swdDataRead(rp, 3u);
swdDataIdle();
swdTurnaround();
swdDataPP();
data1[0] = data & 0xFFu;
data1[1] = (data >> 8u) & 0xFFu;
data1[2] = (data >> 16u) & 0xFFu;
data1[3] = (data >> 24u) & 0xFFu;
data1[4] = swdParity(data1, 8u * 4u);
swdDatasend(data1, 33u);
swdDataPP();
for (i = 0u; i < 20u; ++i) {
swdTurnaround();
}
ret = rp[0];
return ret;
}
swdStatus_t swdReadIdcode(uint32_t* const idCode) {
uint32_t ret;
ret = swdReadPacket(swdPortSelectDP, 0x00u, idCode);
return ret;
}
swdStatus_t swdSelectAPnBank(uint8_t const ap, uint8_t const bank) {
swdStatus_t ret = swdStatusNone;
uint32_t data = 0x00000000u;
data |= (uint32_t)(ap & 0xFFu) << 24u;
data |= (uint32_t)(bank & 0x0Fu) << 0u;
/* write to select register */
ret |= swdWritePacket(swdPortSelectDP, 0x02u, data);
return ret;
}
static swdStatus_t swdReadAP0(uint32_t* const data) {
swdStatus_t ret = swdStatusNone;
swdReadPacket(swdPortSelectAP, 0x00u, data);
return ret;
}
swdStatus_t swdSetAP32BitMode(uint32_t* const data) {
swdStatus_t ret = swdStatusNone;
swdSelectAPnBank(0x00u, 0x00u);
uint32_t d = 0u;
ret |= swdReadAP0(&d);
ret |= swdReadPacket(swdPortSelectDP, 0x03u, &d);
d &= ~(0x07u);
d |= 0x02u;
ret |= swdWritePacket(swdPortSelectAP, 0x00u, d);
ret |= swdReadAP0(&d);
ret |= swdReadPacket(swdPortSelectDP, 0x03u, &d);
if (data != NULL) {
*data = d;
}
return ret;
}
swdStatus_t swdSelectAHBAP(void) {
swdStatus_t ret = swdSelectAPnBank(0x00u, 0x00u);
return ret;
}
swdStatus_t swdReadAHBAddr(uint32_t const addr, uint32_t* const data) {
swdStatus_t ret = swdStatusNone;
uint32_t d = 0u;
ret |= swdWritePacket(swdPortSelectAP, 0x01u, addr);
ret |= swdReadPacket(swdPortSelectAP, 0x03u, &d);
ret |= swdReadPacket(swdPortSelectDP, 0x03u, &d);
*data = d;
return ret;
}
swdStatus_t swdEnableDebugIF(void) {
swdStatus_t ret = swdStatusNone;
ret |= swdWritePacket(swdPortSelectDP, 0x01u, 0x50000000u);
return ret;
}
swdStatus_t swdInit(uint32_t* const idcode) {
swdStatus_t ret = swdStatusNone;
swdReset();
ret |= swdReadIdcode(idcode);
return ret;
}
main.cpp
/*
* Copyright (C) 2017 Obermaier Johannes
* Copyright (C) 2022 Lucas Teske
*
* This Source Code Form is subject to the terms of the MIT License.
* If a copy of the MIT License was not distributed with this file,
* you can obtain one at https://opensource.org/licenses/MIT
*/
#include <Arduino.h>
extern "C" {
#include "main.h"
#include "reader.h"
}
// STM32 target flash memory size in bytes
uint32_t size = 32768;
// Usually the STM32F0x starts here.
// If you're trying to dump another series check the datasheet.
uint32_t flashAddress = 0x08000000;
void setup() {
swdStatus_t status;
Serial.begin(115200);
pinMode(TARGET_RESET_Pin, OUTPUT);
pinMode(TARGET_PWR_Pin, OUTPUT);
pinMode(SWDIO_Pin, OUTPUT);
pinMode(SWCLK_Pin, OUTPUT);
targetInit();
digitalWrite(LED1_Pin, HIGH);
while(!Serial.available()) {
delay(1000);
Serial.println("Send anything to start...");
}
Serial.println("Starting");
uint32_t flashData = 0;
for (uint32_t i = 0; i < size; i+=4) {
flashData = 0;
status = extractFlashData(flashAddress + i, &flashData);
if (status != swdStatusOk) {
Serial.printf("Error reading: %d\r\n", status);
break;
}
Serial.printf("%08x: %08x\r\n", flashAddress + i, flashData);
}
Serial.println("DONE");
}
void loop() {}
Cite este artigo Plain text · BibTeX
Citação sugerida
Lucas Teske. “STM32F0x Protected Firmware Dumper.” Lets Hack It, 2024. https://lucasteske.dev/pt/2024/01/stm32f0x-protected-firmware-dumper.
BibTeX
@misc{teske2024stm32f0xprotectedfirmwaredumper,
author = {Lucas Teske},
title = {STM32F0x Protected Firmware Dumper},
year = {2024},
publisher = {Lets Hack It},
url = {https://lucasteske.dev/pt/2024/01/stm32f0x-protected-firmware-dumper}
}